-
Submission deadline:
12 May, 2021 UTC-12 - Notification:
21 June, 2021 - Workshop: Friday, 6 August, 2021
HPlan
Fourth ICAPS Workshop on Hierarchical Planning (HPlan)
- Theoretical foundations, e.g., complexity results
- Heuristics, search, and other solving techniques for plan generation
- Techniques and foundations for providing modeling support
- Challenges and lessons learned from modeling systems (using hierarchical models)
- Applications of hierarchical planning
- Plan explanation for hierarchical models
- Hierarchical plan repair techniques
- Techniques for verifying solutions of hierarchical planning problems
- How to log in?
- First, log into the ICAPS website
- Now you should see a button "Attending" on the top-right next to your name, which was previously the login button
- Clicking it will reveal a large "Go to Gather -->" button. Click it! :)
- Please use your full name for your Avatar.
- Please use the button "g" while walking to enable the ghost mode, thus preventing you from opening audio and video connections while just walking by other people. That way you can also walk through others, which is practical in crowded spaces.
- You will be able to find the posters from the names of the respective papers.
- If you meet other people in a private area, note that under the line of videos in gather.town there is a double-arrow pointing to the bottom. If you hit it you see all group members like you would in Zoom.
- As said above, in order to join a zoom session, you have to hit "x" within our HPlan workshop room, thus temporarily leaving gather.town and running zoom.
- Note that the people presenting a poster might also want to attend a poster, so it could be that some poster is temporarily unattended for some some short while — just like in real life!
- We've added a few tables (small private areas) near the entrance of the workshop room (see screenshot below), where you could go to continue discussions after a session in case time was too short. Note that one poster session is scheduled right after another, so continuing discussion over the designated time window would not be possible as that would interrupt the next presentation and discussion.
- Note that authors or even participants might want to share their screen, e.g., to share additional sources (presentations, the paper etc.) or to open a whiteboard to draw examples. To do this, click on the computer symbol in your 'console' in the middle and bottom of your screen -- cf. screenshot below. Note that multiple people can share their screens simultaneously! They are just offered as additional screens that people can click on. (Make sure not to share the wrong thing or forget about it so you don't accidentally show private data like web pages or emails, etc.)
- Technical research papers (short or long) and
- Challenge papers (short).
- Paper submission:
12 May(Papers may be updated until 17 May, but they need to be submitted and complete until the 12th. The additional days are only intended for optional minor improvements.) - Notification:
21 June - Camera-ready paper submission:
26 July - Publish list of accepted papers:
before HPlan - Proceedings/papers online:
before HPlan - HPlan Workshop: Friday, 6 August, 2021 (6 hours), see ICAPS schedule (day 5) for time zone selection! Some selected time zones:
- 5 am to 11 am in parts of USA (EST)
- 9 am to 3 pm at virtual ICAPS (GMT)
- 11 am to 5 pm in e.g., Germany (MEST)
- 7 pm to 1 am in e.g., Canberra, Sydney, Melbourne (AEST)
- Compiling HTN Plan Verification Problems into HTN Planning Problems
by Daniel Höller, Julia Wichlacz, Pascal Bercher, and Gregor Behnke - On the Computational Complexity of Correction HTN Domain Models
by Songtuan Lin and Pascal Bercher - The Complexity of Flexible FOND HTN Planning
by Dillon Chen and Pascal Bercher - A Hierarchical Approach to Multi-Agent Path Finding
by Han Zhang, Mingze Yao, Ziang Liu, Jiaoyang Li, Lucas Terr, Shao-Hung Chan, T. K. Satish Kumar, and Sven Koenig - Task and Situation Structures for Service Agent Planning (that's a long version of a paper that was simultaneously accepted at the International Conference on Case-Based Reasoning (ICCBR 2021)
by Hao Yang, Tavan Eftekhar, Chad Esselink, Yan Ding, and Shiqi Zhang - Solving Hierarchical Auctions with HTN Planning
by Antoine Milot, Estelle Chauveau, Simon Lacroix, and Charles Lesire - Correcting Hierarchical Plans by Action Deletion (that paper was simultaneously accepted at the International Conference on Principles of Knowledge Representation and Reasoning (KR 2021)
by Roman Barták, Simona Ondrčková, Gregor Behnke, and Pascal Bercher - On the Verification of Totally-Ordered HTN Plans
by Roman Barták, Simona Ondrčková, Gregor Behnke, and Pascal Bercher - Temporal Hierarchical Task Network Planning with Nested Multi-Vehicle Routing Problems - A Challenge to be Resolved
by Jane Jean Kiam, Pascal Bercher, and Axel Schulte - Towards Robust Constraint Satisfaction in Hybrid Hierarchical Planning
by Tobias Schwartz, Michael Sioutis, and Diedrich Wolter - Domain Analysis: A Preprocessing Method that Reduces the Size of the Search Tree in Hybrid Planning
by Michael Staud - GTPyhop: A Hierarchical Goal+Task Planner Implemented in Python
by Dana Nau, Sunandita Patra, Mark Roberts, Yash Bansod, and Ruoxi Li - Integrating Planning and Acting With a Re-Entrant HTN Planner
by Yash Bansod, Dana Nau, Sunandita Patra, and Mark Roberts - Solving POMDPs online through HTN Planning and Monte Carlo Tree Search
by Robert P. Goldman - 9:00-9:10: Gathering and Welcome Words
- 9:10-10:10: Invited Talk (live!) by Malik Ghallab (with 15 minutes Q&A)
- 10:10-10:15: 5 minute break
- 10:15-12:05: poster teaser tasks for all 14 papers. 5-10 minutes each, no questions.
- 12:05-10:15: 10 minute break
- (poster 01) Compiling HTN Plan Verification Problems into HTN Planning Problems
- (poster 02) On the Computational Complexity of Correction HTN Domain Models
- (poster 04) The Complexity of Flexible FOND HTN Planning
- (poster 01) A Hierarchical Approach to Multi-Agent Path Finding
- (poster 02) Task and Situation Structures for Service Agent Planning
- (poster 04) Solving Hierarchical Auctions with HTN Planning
- (poster 01) Correcting Hierarchical Plans by Action Deletion
- (poster 02) Temporal Hierarchical Task Network Planning with Nested Multi-Vehicle Routing Problems - A Challenge to be Resolved
- (poster 03) On the Verification of Totally-Ordered HTN Plans
- (poster 04) Towards Robust Constraint Satisfaction in Hybrid Hierarchical Planning
- (poster 01) Domain Analysis: A Preprocessing Method that Reduces the Size of the Search Tree in Hybrid Planning
- (poster 02) GTPyhop: A Hierarchical Goal+Task Planner Implemented in Python
- (poster 03) Integrating Planning and Acting With a Re-Entrant HTN Planner
- (poster 04) Solving POMDPs online through HTN Planning and Monte Carlo Tree Search
- A hierarchical task-oriented knowledge representation for expressing operational models of actions (how to do things), which relies on a collection of refinement methods describing alternative ways to handle tasks and react to events. A refinement method can be any complex algorithm, with subtasks to be refined recursively and nondeterministic primitive actions which query and change the world.
- A Refinement Acting Engine (RAE) which interacts with an execution platform and performs online reasoning for the achievement of tasks and reaction to events by following refinement methods adapted to the current dynamic context, and retrying alternative methods when needed. RAE chooses its refinement methods with the help of a online optimizing planner.
- A Monte Carlo Tree Search planner, called UPOM, which assesses the utility of possible methods and finds an approximately optimal one for RAE to pursue an ongoing activity. UPOM is a progressive deepening, receding-horizon anytime planner which relies on domain-dependent heuristics, learned from simulations and/or real-world interactions.
- Ghallab, M., Nau, D., and Traverso, P. (2014). The actor’s view of automated planning and acting: A position paper. Artificial Intelligence, 208:1–17.
- Ghallab, M., Nau, D., and Traverso, P. (2016). Automated Planning and Acting. Cambridge University Press.
- Patra, S., Ghallab, M., Nau, D., and Traverso, P. (2019). APE: An Acting and Planning Engine. Advances in Cognitive systems, 7:175–194.
- Patra, S., Mason, J., Ghallab, M., Nau, D., and Traverso, P. (2021). Deliberative acting, planning and learning with hierarchical operational models. Artificial Intelligence, 299:103523.
- Patra, S., Mason, J., Ghallab, M., Traverso, P., and Nau, D. (2020). Integrating Acting, Planning, and Learning in Hierarchical Operational Models. In International Conference on Automated Planning and Scheduling (ICAPS 2020), pages 1–10.
- Patra, S., Traverso, P., Ghallab, M., and Nau, D. (2019). Acting and planning using operational models. In AAAI Conference on Artificial Intelligence (AAAI 2019), pages 7691–7698.
- In 2020, the International Planning Competition (IPC) was on Hierarchical Task Network Planning. Visit ipc2020.hierarchical-task.net for results, participating planners, planning benchmarks, and more!
-
HPlan has a
YouTube channel, which hosts the recorded talks since HPlan 2020 as well
as the results presentation of IPC 2020.
- YouTube playlist for all invited talks since 2020
- YouTube playlist for all talks of HPlan 2021
- YouTube playlist for all talks of HPlan 2020
- We have a mailing list (via google groups) for hierarchical planning with currently approx. 70 subscribers. The list is low traffic, moderated, and only allows mails related to hierarchical planning! Interested? Drop Pascal a mail.
- Ron Alford
- Roman Barták
- Gregor Behnke
- Pascal Bercher
- Arthur Bit-Monnot
- Dillon Chen
- Lavindra de'Silva
- Juan Fernández-Olivares
- Florian Geißer
- Alban Grastien
- Daniel Höller
- Jane Jean Kiam
- Ugur Kuter
- Songtuan Lin
- Mauricio Cecilio Magnaguagno
- Conny Olz
- Simona Ondrčková
- Sunandita Patra
- Felix Richter
- Dominik Schreiber
- Shirin Sohrabi
- David Speck
- Alvaro Torralba
- Julia Wichlacz
- Zhanhao Xiao
- Pascal Bercher, pascal.bercher at anu.edu.au
- Jane Jean Kiam, jane.kiam at unibw.de
- Zhanhao Xiao, xiaozhh9 at mail.sysu.edu.cn
- Ron Alford, ralford at mitre.org
The motivation for using hierarchical planning formalisms is manifold. It ranges from an explicit and predefined guidance of the plan generation process and the ability to represent complex problem solving and behavior patterns to the option of having different abstraction layers when communicating with a human user or when planning co-operatively. The best-known formalism in the field is Hierarchical Task Network (HTN) planning. In addition, there are several other hierarchical planning formalisms, e.g., hybrid planning (incorporating aspects from POCL planning), Hierarchical Goal Network (HGN) planning (incorporating a hierarchy on goals), or formalisms that combine task hierarchies with timeline planning (e.g. ANML). Hierarchies induce fundamental differences from classical planning, creating distinct computational properties and requiring separate algorithms from non-hierarchical planners. Many of these aspects of hierarchical planning are still unexplored. Thus, we encourage any contribution, independent of the underlying hierarchical planning formalism, and want to provide a forum for researchers to discuss the various aspects of hierarchical planning.
Topics of interests include but are not limited to:
Attending HPlan
Like ICAPS (and just like in 2020), HPlan will be carried out via gather.town. This year, attendance isn't free. To register for the entire ICAPS conference (including all workshops), it's 50 USD for non-students and 20 USD for students.The first parts (invited talk and teaser talks) will be via zoom, the poster sessions will be carried out via gather.town. See our schedule below for more details. The zoom link is provided within our workshop room (behind door 1), you obtain it by pressing 'x'.
Some further useful information on attendance and gather.town:
Submission Details
The formatting guidelines (author kit, etc.) are the same as for ICAPS 2021. Like at the main conference, there will be a high quality double-blind review process against the standard ICAPS criteria of significance, soundness, scholarship, clarity, and reproducibility. However, submissions may be less evolved than at the main conference.
We have two categories:
Technical research papers are standard conference papers, but may be less evolved. The purpose of challenge papers is to report on or to make aware of interesting/important problems in Hierarchical Planning and to encourage discussion at the workshop -- not to present some significant contribution.
Authors may submit *long papers* (up to 8 pages plus up to one page of references) or *short papers* (up to 4 pages plus up to one page of references). The purpose of short papers is to encourage publications of more preliminary results; challenge papers need to be short papers. In case of acceptance, the full 5, resp. 9, pages can be used for the paper, e.g. to address the reviewers' comments.
If you are interested in presenting work that was accepted or published at a conference or journal, please contact the organizers. We will not include such a paper into our proceedings, but we are happy to discuss options for presenting such work.
Submission page: https://easychair.org/conferences/?conf=hplan2021
Important Dates
The reference timezone for all deadlines is UTC-12, i.e., AoE.
Accepted papers
You find most of the teaser talks for the papers in HPlan's YouTube channel.
Schedule
9:00-12:15, Plenum Session:12:15-13:00, Poster Session 1: Complexities and Compilations
13:00-13:45, Poster Session 2: Applications
13:45-14:30, Poster Session 3: Challenges and Plan Verification
14:30-15:15, Poster Session 4: Solving Planning Problems
Where to find which poster?
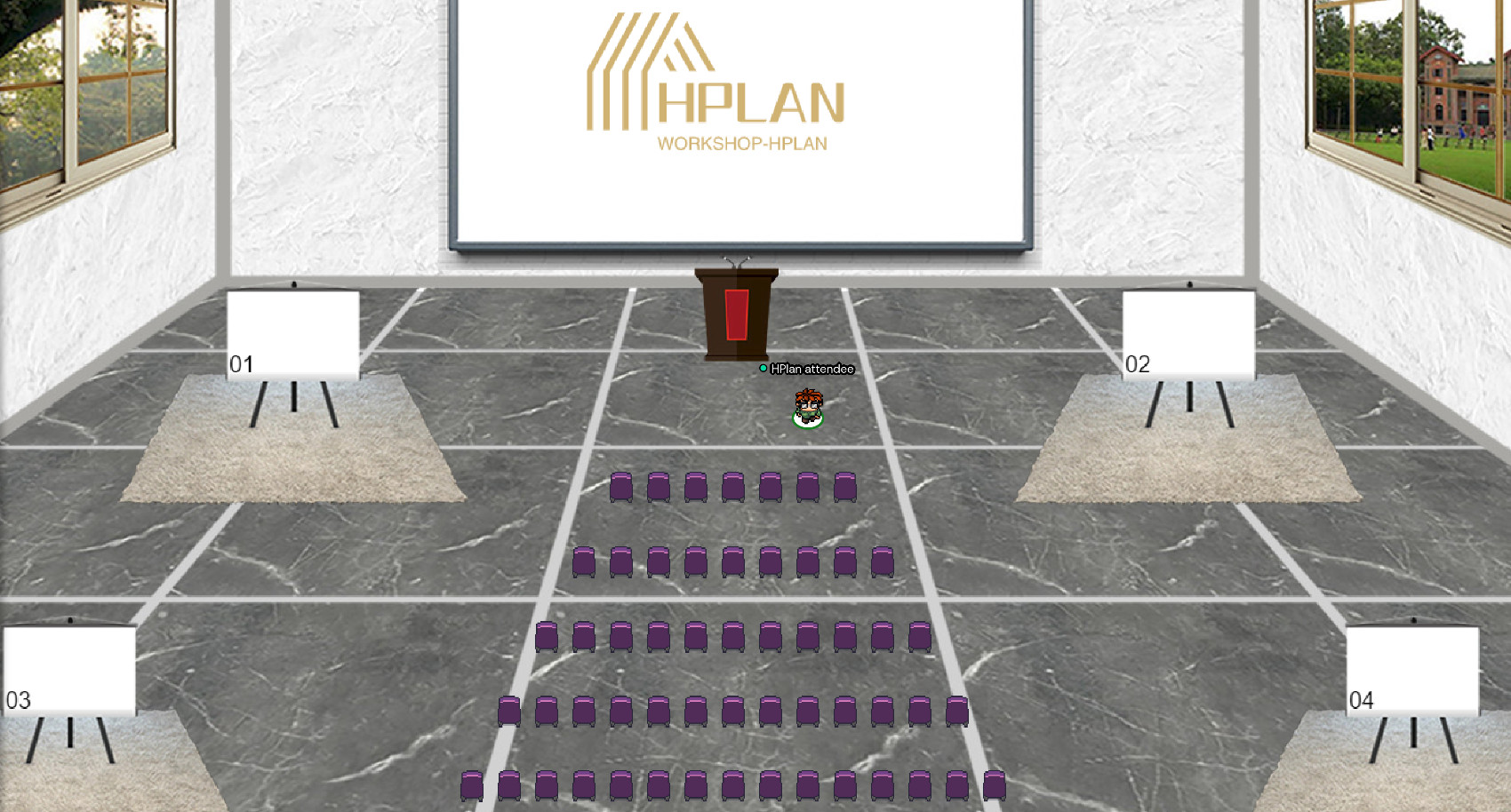
The screenshot above shows the HPlan workshop room, where you find four poster stands: 01, 02, 03, and 04. In the schedule above we've indicated at which poster stand each paper will be presented.
Invited Talk
Malik Ghallab gives an invited talk (available on YouTube) about:Hierarchical Online Reasoning for the Integration of Planning and Acting
Hierarchization in planning has often been viewed mainly as a means for reducing the search complexity, to be paid for with additional domain modeling efforts. HTN planning, for example, has sometime been opposed to generative planning techniques, and referred to as a programming paradigm in planning. We pursue here a quite different motivation for hierarchization than tractable computations in a huge search space. Namely, we are interested in planning for the purpose of acting, and consider hierarchization as a central concept for the integration of reasoning on actions and performing them.
We have argued in [1] that the design of a cognitive actor has to rely on two interconnected principles: (i) hierarchically organized deliberation, and (ii) continual online planning and reasoning. Many challenging problems for such a design have been underlined in [1], several of which remain pending, while a few have progressed towards acceptable solutions. This talk will report on a line of work that illustrates such a progress.1 Initiated in [2, Chap. 3], the work was pursued through several algorithmic developments and trials, e.g., in [3, 5, 6]; it reached a comprehensive stage in [4]. The talk will motivate the integrated planning and acting issues and present three technical components:
2: A “Demonstration of Refinement Acting, Planning and Learning System Using Operational Models” will be presented at the ICAPS 2021 demonstration session.
References
Bio
Malik Ghallab, Directeur de recherche emeritus at CNRSLAAS-CNRS, 7 Av. Colonel Roche, 31077 Toulouse, France
The research activity of Malik Ghallab is focused on AI and Robotics. He contributed to topics such as knowledge representation and reasoning, planning, and learning of skills and models of behaviors. He (co-)authored over 200 technical papers and several books. He taught AI at a few universities in France and abroad; he advised 32 PhDs. He was director of several AI research programs in France, director of LAAS-CNRS and CTO of INRIA. He chairs the Steering Committee of ANITI, the interdisciplinary AI institute of Toulouse. His is involved in initiatives regarding socially responsible research in AI and computational sciences. He is ECCAI Fellow, and Docteur Honoris Causa of Linköping University, Sweden.
Various
Previous HPlan workshops
Previous workshops are available here:
Or simply http://hplanYYYY.hierarchical-task.net (with YYYY being the year)