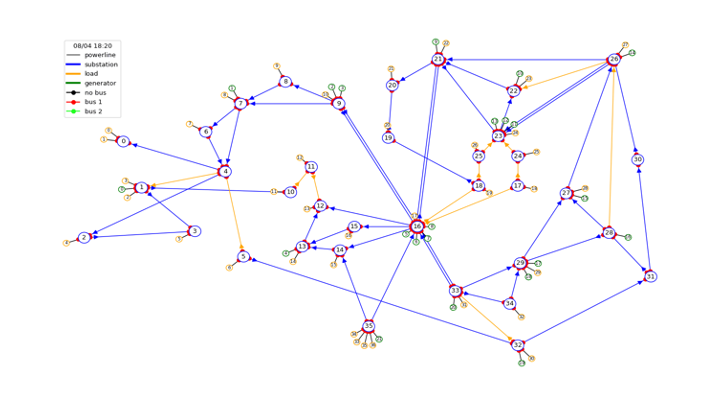
Learning to Run a Power Network with Trust
Winner (Anyone Track) 7,500 USD
Best Student Prize 1,000 USD
On the way towards a sustainable future and following up the
success of
L2RPN 2020 NeurIPS competition, this competition aims at unleashing the power of
artificial intelligence even further for our real-world
industrial application: controlling electricity power
transmission in real-time and moving closer to truly “smart”
grids using underutilized flexibilities. In 2020,
participants were asked to develop an agent to be robust to
unexpected events and keep delivering reliable electricity
everywhere even in difficult circumstances.
In this competition, participants, while dealing with a
higher penetration of renewable energy, will be asked in
addition to design trustworthy agents that are able to
communicate when they are in trouble, especially when they
might fail. This will more concretely lead the path towards
an AI assistant for human operators, who will still be
responsible for managing the grid, rather than a mere
blackbox agent. Join us for this Augmented Intelligence
competition!

Automatic Reinforcement Learning for Dynamic Job Shop
Scheduling Problem
Second Prize 2,000 USD
Third Prize 1,000 USD
Special Prizes 500 USD
In this competition, participants are invited to develop automatic reinforcement learning solutions to the dynamic job shop scheduling problem (DJSSP). The solutions are expected to automatically train promising agents on a distribution of DJSSP tasks. After a feedback phase where solutions can be developed and fine-tuned with daily feedback, those that perform best on a set of five unseen tasks win the competition.

The Flatland Challenge: Multi-Agent Reinforcement Learning
on Trains
This challenge tackles a key problem in the transportation world: How to efficiently manage dense traffic on complex railway networks? This is a real-world problem faced by many transportation and logistics companies around the world such as the Swiss Federal Railways and Deutsche Bahn. Your contribution may shape the way modern traffic management systems are implemented, not only in railway but also in other areas of transportation and logistics!
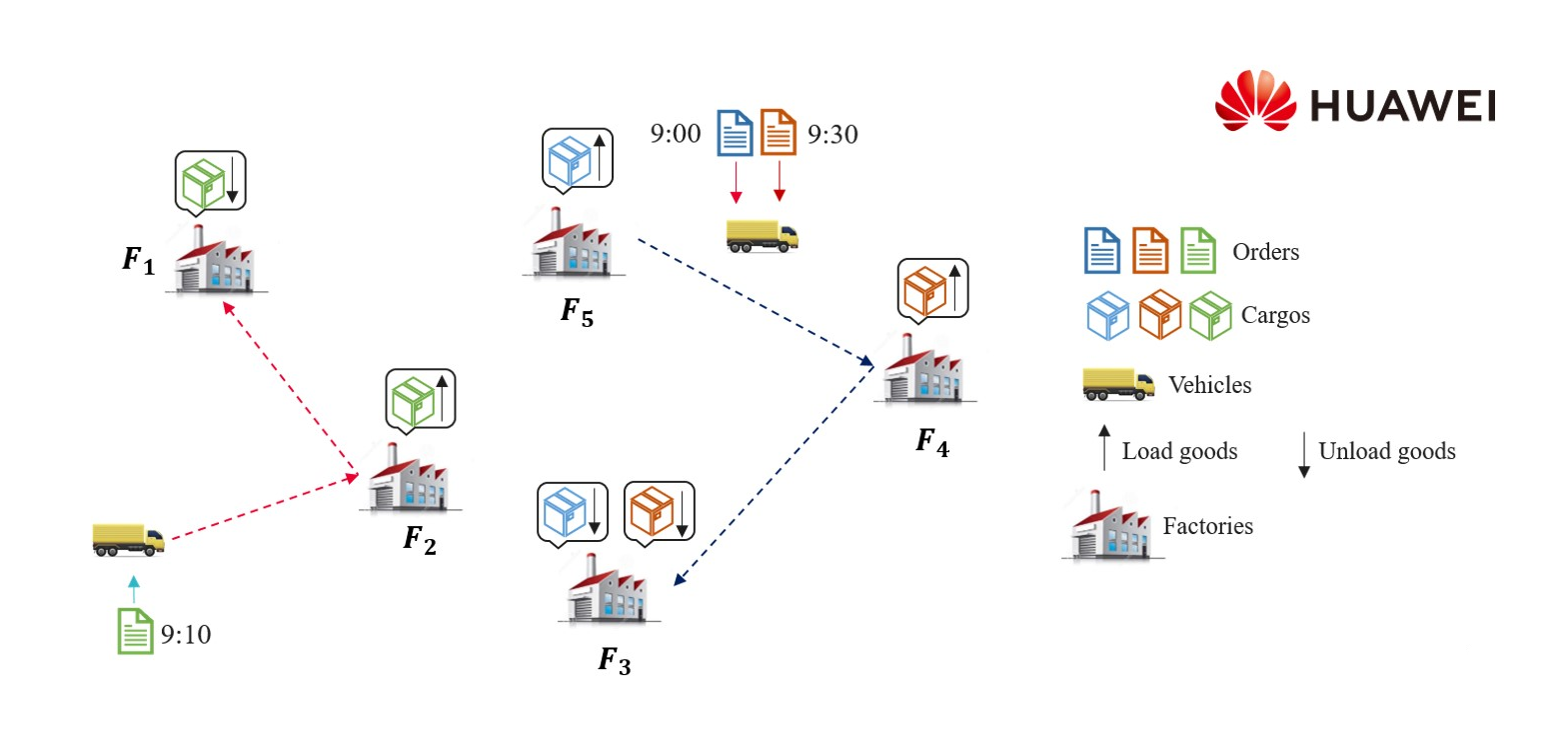
The Dynamic Pickup and Delivery Problem
Second Prize 3,000 USD
Third Prize 2,000 USD
The Dynamic Pickup and Delivery Problem (DPDP) is an essential problem within the logistics domain. So far, research on this problem has mainly focused on using artificial data which fails to reflect the complexity of real-world problems. With this competition, we hope to promote the research and development of techniques applicable to such problems, by building the competition around a dataset generated from real business scenarios of Huawei Technologies Ltd.
ICAPS Competitions
Read more about the rich history of competitions at ICAPS here, including more than two decades of the International Planning Competition. This year we continue this tradition and bring to you a host of challenges based on real world data with help from our partners across industry and academia. We hope this keeps you busy during the summer as we await a slightly delayed ICAPS in Fall! 🤓
Got questions? Please reach out to the ICAPS 2021 Competition Chairs.